Media Summary: "**Safe Policy Learning for Continuous Control** Yinlam Chow (Google AI)*; Ofir Nachum (Google); Aleksandra Faust (Google ... "**DIRL: Domain-Invariant Representation Learning for Sim-to-Real Transfer** Ajay Tanwani (UC Berkeley)* Publication: ... "**Learning to Improve Multi-Robot Hallway Navigation** Jin Soo Park (The University of Texas at Austin)*; Brian Tsang ...
Corl 2020 Spotlight Talk 171 - Detailed Analysis & Overview
"**Safe Policy Learning for Continuous Control** Yinlam Chow (Google AI)*; Ofir Nachum (Google); Aleksandra Faust (Google ... "**DIRL: Domain-Invariant Representation Learning for Sim-to-Real Transfer** Ajay Tanwani (UC Berkeley)* Publication: ... "**Learning to Improve Multi-Robot Hallway Navigation** Jin Soo Park (The University of Texas at Austin)*; Brian Tsang ... "**Model-Based Inverse Reinforcement Learning from Visual Demonstrations** Neha Das (Facebook AI Research)*; Sarah ... "**Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning** Le ... "**Action-based Representation Learning for Autonomous Driving** Yi Xiao (CVC & UAB)*; Felipe Codevilla (MILA); Christopher ...
"**Learning 3D Dynamic Scene Representations for Robot Manipulation** Zhenjia Xu (Columbia University)*; Zhanpeng He ... "**Towards Robotic Assembly by Predicting Robust, Precise and Task-oriented Grasps** Jialiang Zhao (Carnegie Mellon ... "**Generation of Realistic Images for Learning in Simulation using FeatureGAN** Nicolas Cruz (Universidad de Chile)*; Javier ... "**Learning Stability Certificates from Data** Nicholas Boffi (Harvard University); Stephen Tu (Google)*; Nikolai Matni (University ... Nonparametric Motion Retargeting for Humanoid Robots on Shared Latent Space** Sungjoon Choi (Disney Research)*; Matthew ... "**High Acceleration Reinforcement Learning for Real-World Juggling with Binary Rewards** Kai Ploeger (TU Darmstadt)*; ...
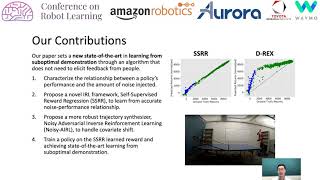
"**Learning from Suboptimal Demonstration via Self-Supervised Reward Regression** Letian Chen (Georgia Institute of ...