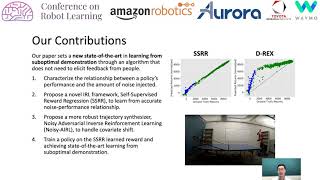
Media Summary: "**Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning** Le ... "**Learning from Suboptimal Demonstration via Self-Supervised Reward Regression** Letian Chen (Georgia Institute of ... "**Model-Based Inverse Reinforcement Learning from Visual Demonstrations** Neha Das (Facebook AI Research)*; Sarah ...
Corl 2020 Spotlight Talk 285 - Detailed Analysis & Overview
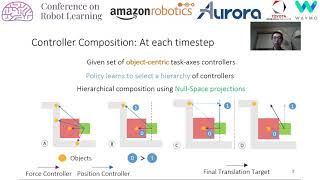
"**Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning** Le ... "**Learning from Suboptimal Demonstration via Self-Supervised Reward Regression** Letian Chen (Georgia Institute of ... "**Model-Based Inverse Reinforcement Learning from Visual Demonstrations** Neha Das (Facebook AI Research)*; Sarah ... "**Relational Learning for Skill Preconditions** Mohit Sharma (Carnegie Mellon University)*; Oliver Kroemer (Carnegie Mellon ... "**Learning to Compose Hierarchical Object-Centric Controllers for Robotic Manipulation** Mohit Sharma (Carnegie Mellon ... "**Self-Supervised Object-in-Gripper Segmentation from Robotic Motions** Wout Boerdijk (DLR)*; Martin Sundermeyer (German ...
"**Learning Vision-based Reactive Policies for Obstacle Avoidance** Elie Aljalbout (Technical University of Munich)*; Ji Chen ... "**Learning Dexterous Manipulation from Suboptimal Experts** Rae Jeong (DeepMind)*; Jost Tobias Springenberg (DeepMind); ... "**MELD: Meta-Reinforcement Learning from Images via Latent State Models** Zihao Zhao (UC Berkeley); Anusha Nagabandi ... "**Self-Supervised Learning of Scene-Graph Representations for Robotic Sequential Manipulation Planning** Son Nguyen ... "**Deep Latent Competition: Learning to Race Using Visual Control Policies in Latent Space** Wilko Schwarting (Massachusetts ... "**Towards Robotic Assembly by Predicting Robust, Precise and Task-oriented Grasps** Jialiang Zhao (Carnegie Mellon ...
"**A Long Horizon Planning Framework for Manipulating Rigid Pointcloud Objects** Anthony Simeonov (Massachusetts Institute ...