Media Summary: "**Learning 3D Dynamic Scene Representations for Robot Manipulation** Zhenjia Xu (Columbia University)*; Zhanpeng He ... "**DIRL: Domain-Invariant Representation Learning for Sim-to-Real Transfer** Ajay Tanwani (UC Berkeley)* Publication: ... "**High Acceleration Reinforcement Learning for Real-World Juggling with Binary Rewards** Kai Ploeger (TU Darmstadt)*; ...
Corl 2020 Spotlight Talk 35 - Detailed Analysis & Overview
"**Learning 3D Dynamic Scene Representations for Robot Manipulation** Zhenjia Xu (Columbia University)*; Zhanpeng He ... "**DIRL: Domain-Invariant Representation Learning for Sim-to-Real Transfer** Ajay Tanwani (UC Berkeley)* Publication: ... "**High Acceleration Reinforcement Learning for Real-World Juggling with Binary Rewards** Kai Ploeger (TU Darmstadt)*; ... Spatial Action Maps for Mobile Manipulation** Jimmy Wu (Princeton University)*; Xingyuan Sun (Princeton University); Andy Zeng ... "**Action-based Representation Learning for Autonomous Driving** Yi Xiao (CVC & UAB)*; Felipe Codevilla (MILA); Christopher ... "**Safe Policy Learning for Continuous Control** Yinlam Chow (Google AI)*; Ofir Nachum (Google); Aleksandra Faust (Google ...
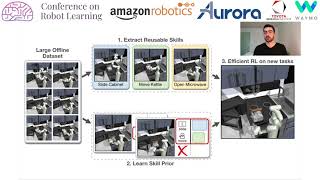
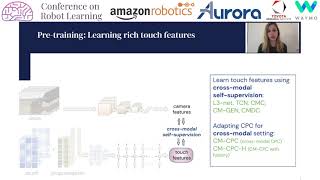
"**Learning Trajectories for Visual-Inertial System Calibration via Model-based Heuristic Deep Reinforcement Learning** Le ... Shared Autonomy with Learned Latent Actions** Hong Jun Jeon (Stanford University)*; Dylan Losey (Stanford University); Dorsa ... "**Asynchronous Deep Model Reference Adaptive Control** Girish Joshi (University of Illinois Urbana-Champaign)*; Jasvir Virdi ... "**Deep Reactive Planning in Dynamic Environments** Kei Ota (Mitsubishi Electric Corporation)*; Devesh Jha (MERL); Tadashi ... "**Accelerating Reinforcement Learning with Learned Skill Priors** Karl Pertsch (University of Southern California)*; Youngwoon ... "**Learning rich touch representations through cross-modal self-supervision** Martina Zambelli (DeepMind)*; Yusuf Aytar ...
Quantile QT-Opt for Risk-Aware Vision-Based Robotic Grasping** Cristian Bodnar (University of Cambridge)*; Adrian Li (X); Karol ...