Media Summary: This is the ICRA 2020 presentation video for our work: Authors: Javier Dominguez-Conti, Jianfeng Yin, Yacine Alami, and Javier Civera. Abstract: The initialization is one of the less ... Accepted to ICRA2021. Abstract: This paper studies the problem of multi-robot cooperative
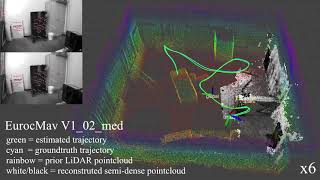
Visual Inertial Mapping With Non - Detailed Analysis & Overview
This is the ICRA 2020 presentation video for our work: Authors: Javier Dominguez-Conti, Jianfeng Yin, Yacine Alami, and Javier Civera. Abstract: The initialization is one of the less ... Accepted to ICRA2021. Abstract: This paper studies the problem of multi-robot cooperative In this letter, we develop a low-cost stereo Accepted to ICRA2022. We revisit the problem of efficiently leveraging prior This talk was presented at the ICRA21 Workshop on
This is the video to our IROS 2015 submission. It shows our MAV in a realistic industrial environment. We only use a stereo ... ALVIO: Adaptive Line and Point Feature-based This video shows experimental results on public datasets and real-world environments with our recently proposed


![[2022,IROS]Towards Robust Visual-Inertial Odometry with Multiple Non-Overlapping Monocular Cameras](https://i.ytimg.com/vi/r7QvPth1m10/mqdefault.jpg)