Media Summary: The video summarizes the state of the on-going research activities on Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), Preliminary results - work in progress. This video shows an early experimental validation of a Control Barrier Function ...
Safe Physical Human Robot Collaboration - Detailed Analysis & Overview
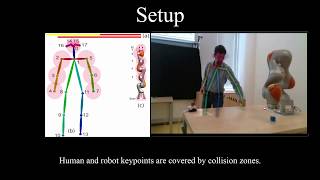
The video summarizes the state of the on-going research activities on Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), Preliminary results - work in progress. This video shows an early experimental validation of a Control Barrier Function ... Recently, the 2025 IEEE International Conference on This video demonstrates the operation of a Series Clutch Actuator (SCA). This device consists of an electronically adjustable ... This video demonstrates a multiple Kinects based exteroceptive sensing framework to achieve
Industries such as manufacturing, construction and infrastructure maintenance have been facing significant challenges in ... My lecture at the IROS 2021 workshop "From Tuttavia la sicurezza fisica non comporta necessariamente un interesse un romano For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in

















![Adaptive physical Human-Robot Interaction using Dynamical Systems [Clearpath Ridgeback]](https://i.ytimg.com/vi/7BjHhV-BkwE/mqdefault.jpg)

