Media Summary: My lecture at the IROS 2021 workshop "From Learn how it facilitates more natural and intuitive Presented in the 10th International Workshop on
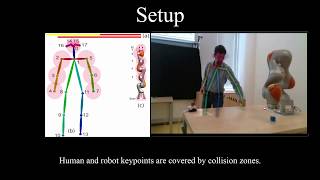
Control Of Physical Human Robot Interaction For Safe Collaborative Tasks - Detailed Analysis & Overview
My lecture at the IROS 2021 workshop "From Learn how it facilitates more natural and intuitive Presented in the 10th International Workshop on A long video that reviews our research results over the last 10 years on This is a video attachment related to the publication: 'A Nonlinear MPC for In this video our data-efficient reinforcement learning framework is applied to learn how to
Svarny, P.; Tesar, M.; Behrens, J. K. & Hoffmann, M. (2019), Presented in the 16th Annual Conference on Towards Autonomous For details, please check our paper: "A Dynamical System Approach to The video summarizes the state of the on-going research This paper examines the framework conditions for Learn more from Monroe Kennedy and Bill Burnett during their on-campus program happening March 20-22, 2024: ...












![Adaptive physical Human-Robot Interaction using Dynamical Systems [kuka LWR 4+]](https://i.ytimg.com/vi/oqHJ8crB5KY/mqdefault.jpg)





