Media Summary: Multi-Fidelity Black-Box Optimization for Time-Optimal Quadrotor Maneuvers** Gilhyun Ryou (Massachusetts Institute of ... Optimally Guarding Perimeters and Regions with Mobile Range Sensors** Siwei Feng (Rutgers University)*; Jingjin Yu (Rutgers ... Deep Drone Acrobatics** Elia Kaufmann (ETH / University of Zurich)*; Antonio Loquercio (ETH / University of Zurich); Rene Ranftl ...
Rss 2020 Spotlight Talk 32 - Detailed Analysis & Overview
Multi-Fidelity Black-Box Optimization for Time-Optimal Quadrotor Maneuvers** Gilhyun Ryou (Massachusetts Institute of ... Optimally Guarding Perimeters and Regions with Mobile Range Sensors** Siwei Feng (Rutgers University)*; Jingjin Yu (Rutgers ... Deep Drone Acrobatics** Elia Kaufmann (ETH / University of Zurich)*; Antonio Loquercio (ETH / University of Zurich); Rene Ranftl ... Swoosh! Rattle! Thump! - Actions that Sound** Dhiraj Gandhi (Carnegie Mellon University)*; Abhinav Gupta (Carnegie Mellon ... Learning Task-Driven Control Policies via Information Bottlenecks** Vincent Pacelli (Princeton University)*; Anirudha Majumdar ... Fast Risk Assessment for Autonomous Vehicles Using Learned Models of Agent Futures** Allen Wang (MIT)*; Xin Huang (MIT); ...
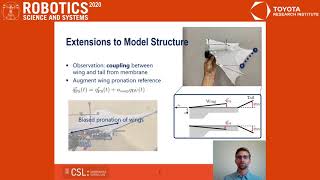
Robot Object Retrieval with Contextual Natural Language Queries** Thao Nguyen (Brown University)*; Nakul Gopalan (Georgia ... Data-driven modeling of a flapping bat robot with a single flexible wing surface** Jonathan Hoff (University of Illinois at ... Regularized Graph Matching for Correspondence Identification under Uncertainty in Collaborative Perception** Peng Gao ... Residual Policy Learning for Shared Autonomy** Charles Schaff (Toyota Technological Institute at Chicago)*; Matthew Walter ... Skill-based Shared Control** Christopher E Mower (University of Edinburgh); Joao Moura (University of Edinburgh); Sethu ... Robust Multiple-Path Orienteering Problem: Securing Against Adversarial Attacks** Guangyao Shi (University of Maryland)*; ...
Planning and Execution using Inaccurate Models with Provable Guarantees** Anirudh Vemula (Carnegie Mellon University)*; ...