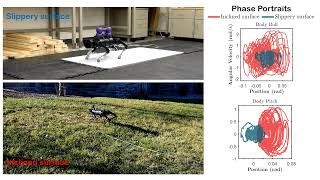
Media Summary: Supplementary video for the Master's Thesis "Deep Compliant In this video, we showcase the ANYmal robot from ANYbotics transitioning from a four-legged gait to bipedal Robust Control for Quadrupedal Locomotion: Learning the Gap between Reduced- and Full-Order Models
Meta Reinforcement Learning For Universal Quadrupedal Locomotion Control - Detailed Analysis & Overview
Supplementary video for the Master's Thesis "Deep Compliant In this video, we showcase the ANYmal robot from ANYbotics transitioning from a four-legged gait to bipedal Robust Control for Quadrupedal Locomotion: Learning the Gap between Reduced- and Full-Order Models Force Control for Quadrupedal Locomotion: A Linear Policy Approach Quadrupedal Locomotion by Combining Deep Reinforcement Learning and Optimal Control CORE- ☑️ QUADS- ☑️ SHOULDERS- ☑️ TRICEPS- ☑️ Of course there are more muscles involved, but these are where ...
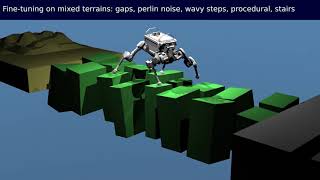
In this video I explain some basic theory regarding Preliminary simulation results for dynamic NVIDIA researchers present a hierarchical framework that combines model-based Here is a quick demonstration of how our AOgmaNeo software can learn to quickly improve upon an existing policy for A Quadruped Robot Imitates Animals from Videos Using Deep Reinforcement Learning Understanding the gap between simulation and reality is critical for