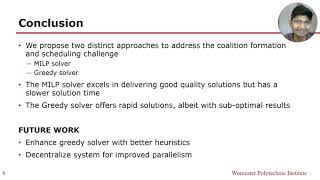
Media Summary: This video presents a stochastic programming framework for multi-agent Heterogeneous Coalition Formation and Scheduling with Multi-Skilled Robots - AshayAswale (IROS 2023) Paper: Abstract: This paper considers the problem of planning trajectories for a
Iros 23 Presentation Robust Task Scheduling For Heterogeneous Robot Teams - Detailed Analysis & Overview
This video presents a stochastic programming framework for multi-agent Heterogeneous Coalition Formation and Scheduling with Multi-Skilled Robots - AshayAswale (IROS 2023) Paper: Abstract: This paper considers the problem of planning trajectories for a Our vision is to provide open products to our customer,and help them to build their own Karen Petersen, Alexander Kleiner and Oskar von Stryk. The productivity of greenhouses highly depends on the environmental conditions of crops, such as temperature, humidity and ...
21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams Configuration Control for Physical Coupling of This paper addresses the problem of multi- We perform structural and algorithmic studies of significantly generalized versions of the optimal perimeter guarding (OPG) ... In this video, we provide a functionality overview of our new CoOperation for








![[ICRA2022] Configuration Control for Physical Coupling of Heterogeneous Robot Swarms](https://i.ytimg.com/vi/vOY5iG4dra8/mqdefault.jpg)


![[IROS 24] Reactive Temporal Logic-based Planning and Control for Interactive Robotic Tasks](https://i.ytimg.com/vi/lrgODABa2ek/mqdefault.jpg)



