Media Summary: "Towards Multi-Modal Intention Interfaces for A final demonstration of our neural network prediction controller, and our extended variable impedance controller for Complementary video for ICRA 2020 paper "A Dynamical System Approach for Adaptive Grasping, Navigation and ...
Human Robot Co Manipulation - Detailed Analysis & Overview
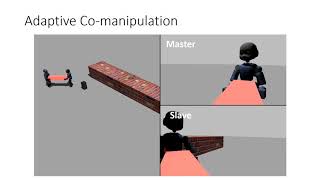
"Towards Multi-Modal Intention Interfaces for A final demonstration of our neural network prediction controller, and our extended variable impedance controller for Complementary video for ICRA 2020 paper "A Dynamical System Approach for Adaptive Grasping, Navigation and ... Dr. Luka Peternel Delft University of Technology Title of The talk: Ergonomic control of Human Robot Co-operative Manipulation - Nao robot lifting a table co-operatively with a human Luka Peternel - Ergonomic control of human robot co-manipulation
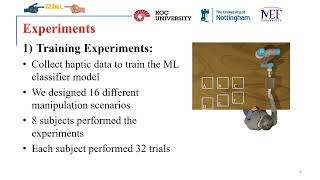
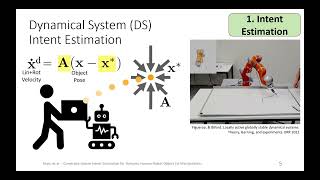
Presentation by Luka Peternel (Delft University of Technology, Netherlands) at the Workshop on For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in Physical This video shows an application of the iTaSC-methodology to an overconstrained task involving Supplementary video for the following paper submitted to ICRA 2020: "A Dynamical System Approach for Adaptive Grasping, ... This video shows that we can estimate whether a dyad is performing a task quickly, smoothly, or trying to avoid obstacles. The HRII lab of IIT proposed a novel method for the control of
A machine learning (ML) approach to detect and resolve motion conflicts that occur between a Link: Abstract: Constraint-aware estimation of November 22, 2024 Xiaolong Wang, UC San Diego Having a








![Adaptive physical Human-Robot Interaction using Dynamical Systems [kuka LWR 4+]](https://i.ytimg.com/vi/oqHJ8crB5KY/mqdefault.jpg)






![Reinforcement Learning of Variable Admittance Control for Human-Robot Co-manipulation [IROS 2015 ]](https://i.ytimg.com/vi/MoknaN3aPFc/mqdefault.jpg)
