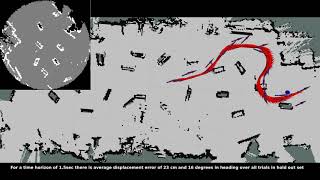
Media Summary: The HRII lab of IIT proposed a novel method for the control of human aware force controlled manipulation using two robots This video shows an application of the iTaSC-methodology to an overconstrained task involving
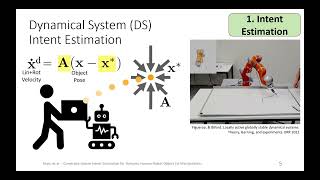
Constraint Aware Intent Estimation For Dynamic Human Robot Object Co Manipulation - Detailed Analysis & Overview
The HRII lab of IIT proposed a novel method for the control of human aware force controlled manipulation using two robots This video shows an application of the iTaSC-methodology to an overconstrained task involving Hidden Markov Models (HMM) are used to recognize

![[RSS 2024] Constraint-Aware Intent Estimation for Dynamic Human-Robot Object Co-Manipulation](https://i.ytimg.com/vi/jSu0y1XHkWg/mqdefault.jpg)



![Manipulator Performance Constraints for Human-Robot Cooperation - Singularity avoidance [ICRA 2016]](https://i.ytimg.com/vi/1zTDmiDjDOA/mqdefault.jpg)