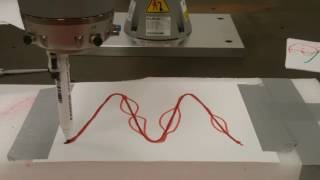
Media Summary: Robot programming is often laborious for tasks with open trajectories such as gluing or soldering since it is difficult and ... Project executed by the student João Victor Rocha Soares using an industrial manipulator to teach a robot to assembly a furniture ... D. Papageorgiou, Z. Doulgeri, Sinc-Based Dynamic Movement Primitives for Encoding Point-to-point Kinematic Behaviors, IROS ...
Huce Roboticslab Dmp Learning By Demonstration 3d - Detailed Analysis & Overview
Robot programming is often laborious for tasks with open trajectories such as gluing or soldering since it is difficult and ... Project executed by the student João Victor Rocha Soares using an industrial manipulator to teach a robot to assembly a furniture ... D. Papageorgiou, Z. Doulgeri, Sinc-Based Dynamic Movement Primitives for Encoding Point-to-point Kinematic Behaviors, IROS ... Future robots are envisioned as versatile systems capable of performing a variety of household tasks. The big question remains, ... This paper investigates the problem of Teaching by









![VidBot: Learning Generalizable 3D Actions from In-the-Wild 2D Human Videos [CVPR 2025]](https://i.ytimg.com/vi/lfI6M1perfQ/mqdefault.jpg)