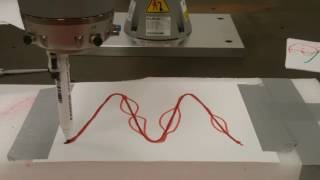
Media Summary: Project executed by the student João Victor Rocha Soares using an industrial manipulator to teach a robot to assembly a furniture ... Robot programming is often laborious for tasks with open trajectories such as gluing or soldering since it is difficult and ... D. Papageorgiou, Z. Doulgeri, Sinc-Based Dynamic Movement Primitives for Encoding Point-to-point Kinematic Behaviors, IROS ...
Huce Roboticslab Dmp Learning By Demonstration 2d - Detailed Analysis & Overview
Project executed by the student João Victor Rocha Soares using an industrial manipulator to teach a robot to assembly a furniture ... Robot programming is often laborious for tasks with open trajectories such as gluing or soldering since it is difficult and ... D. Papageorgiou, Z. Doulgeri, Sinc-Based Dynamic Movement Primitives for Encoding Point-to-point Kinematic Behaviors, IROS ... Welcome to the ODA lab introduction in this short presentation This paper investigates the problem of Teaching by Accepted for presentation in the 29th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN) ...
This work develops an enhanced teaching interface tested on both a Baxter robot and a KUKA iiwa robot. Movements are ... Paper in Robotics & Automation Letters: Also appears in IROS 2018 Authors: ...