Media Summary: For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in Please see our Github repository Our laboratory: Torque-Based Balancing of a Humanoid Robot Performing High-Force Interaction Tasks
Estimating Robot Body Torque For Two Handed Cooperative Physical Human Robot Interaction - Detailed Analysis & Overview
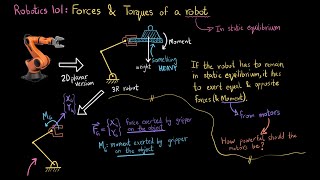
For details, please check our paper: "A Dynamical System Approach to Task-Adaptation in Please see our Github repository Our laboratory: Torque-Based Balancing of a Humanoid Robot Performing High-Force Interaction Tasks This video covers the basics of how to find the forces and This video shows an application of the iTaSC-methodology to an overconstrained task involving Authors: Yoan Sallami, Séverin Lemaignan, Aurélie Clodic, Rachid Alami. Simulation-based physics reasoning for consistent ...
In this paper, we present a framework that unites obstacle avoidance and deliberate This video demonstrates the operation of a Series Clutch Actuator (SCA). This device consists of an electronically adjustable ... "Multi-Contact Planning and Control for a Author: Prof.Luca Iocchi Student Nguyen Ngoc Dat.

![Adaptive physical Human-Robot Interaction using Dynamical Systems [kuka LWR 4+]](https://i.ytimg.com/vi/oqHJ8crB5KY/mqdefault.jpg)