Media Summary: Adaptive Cooperative Control for Human-Robot Load Manipulation Supplemental material for ICRA 2018 submission. Supplementary video for the following paper submitted to ICRA 2020: "A Dynamical System Approach for
Adaptive Cooperative Control For Human Robot Load Manipulation - Detailed Analysis & Overview
Adaptive Cooperative Control for Human-Robot Load Manipulation Supplemental material for ICRA 2018 submission. Supplementary video for the following paper submitted to ICRA 2020: "A Dynamical System Approach for Complementary video for ICRA 2020 paper "A Dynamical System Approach for ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.1 Authors: Culbertson, Preston; Schwager, Mac Title: Decentralized ... Paper: Petitti A, Franchi A, Di Paola D, Rizzo A. Decentralized Motion
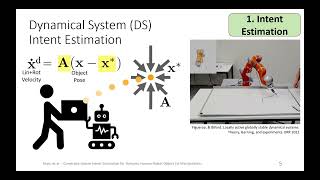
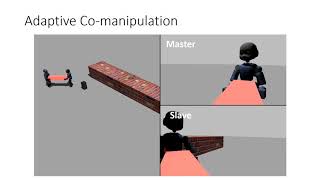
This is a supplementary simulation video for the previously uploaded "Distributed Vivian Chu, Reymundo A. Gutierrez, Sonia Chernova, Andrea L. Thomaz. "Real-time Multisensory Affordance-based This video contains the presentation for the publication titled "“ Cooperative Manipulation via Internal Force Regulation: A Rigidity Theory Perspective Link: Abstract: Constraint-aware estimation of Human-Robot Cooperative Manipulation Using a Leader-Follower-Based Approach
ICRA 2018 Spotlight Video Interactive Session Thu AM Pod B.8 Authors: Almeida, Diogo; Karayiannidis, Yiannis Title: ... Conference: RO-Man 2022 Paper link: This work proposes a novel framework ... The Toyota Research Institute (TRI) is taking on the hard problems in











![Reinforcement Learning of Variable Admittance Control for Human-Robot Co-manipulation [IROS 2015 ]](https://i.ytimg.com/vi/MoknaN3aPFc/mqdefault.jpg)