Media Summary: This is a multimedia extension associated This video presents our recently developed approach for efficient inference and control in This video is part of the paper "Graph Convolutional Network based Configuration Detection for Freeform Modular
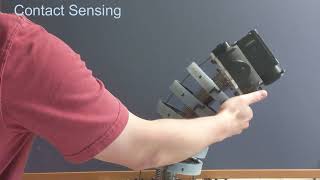
A Multi Modal Sensor Array For Human Robot Interaction Mapping Using Continuum Robots - Detailed Analysis & Overview
This is a multimedia extension associated This video presents our recently developed approach for efficient inference and control in This video is part of the paper "Graph Convolutional Network based Configuration Detection for Freeform Modular Eric Rosen, David Whitney, Michael Fishman, Daniel Ullman, Stefanie Tellex. "Mixed Reality as a Bidirectional Communication ... This is the video presentation for the paper below. In it, we detail modeling, Max McCandless, Frank Juliá Wise, and Russo S., "A Soft
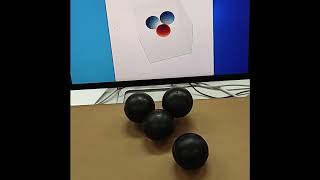
Authors: Yuxiao Tu, Guanqi Liang, and Tin Lun Lam Corresponding author: Tin Lun Lam (Email: tllam.edu.cn; Website: ... This is a multimedia extension for the paper titled "Towards Collaborative Research done by Naveena Pandillapally supervised by Dr. Joshua Marshall. Read the paper: ... Precision in Every Detail, Coverage in Every Modality. Introducing CHINGMU Pulsehand Series - the next-generation Low-cost Virtual Compliance Continuum Robot Thesis - Assembly Time-lapse









![[Presentation] Configuration Detection for Freeform Modular Robot Using Magnetic Sensor Array](https://i.ytimg.com/vi/POlpaHoOG8o/mqdefault.jpg)






