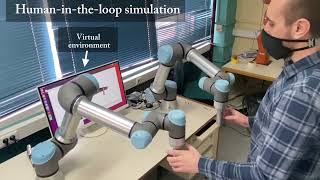
Media Summary: This work is conducted in Argonne National Laboratory. Admittance controller with low and high dampning When the force sensor is grasped, the environment becomes stiff.
Ur 16e Admittance Control Example - Detailed Analysis & Overview
This work is conducted in Argonne National Laboratory. Admittance controller with low and high dampning When the force sensor is grasped, the environment becomes stiff. The two Kuka robots follow a virtual workpiece connecting both together. Testing reaching motions with the BLUE SABINO robot under an adaptive Design and Characterization of a Bio-inspired 3-DOF Tactile/Force Sensor and Implementation on a 3-DOF Decoupled Parallel ...
Hybrid admittance and force control on tilting UAV platform