Media Summary: Grounding Language to Non-Markovian Tasks with No Supervision of Task Specifications** Roma Patel (Brown University)*; Ellie ... Co-Design of Communication and Machine Inference for Cloud Robotics** Manabu Nakanoya (NEC, Japan); Sandeep Chinchali ... Eyes-Closed Safety Kernels: Safety of Autonomous Systems Under Loss of Observability** Forrest Laine (UC Berkeley)*; ...
Rss 2020 Spotlight Talk 16 - Detailed Analysis & Overview
Grounding Language to Non-Markovian Tasks with No Supervision of Task Specifications** Roma Patel (Brown University)*; Ellie ... Co-Design of Communication and Machine Inference for Cloud Robotics** Manabu Nakanoya (NEC, Japan); Sandeep Chinchali ... Eyes-Closed Safety Kernels: Safety of Autonomous Systems Under Loss of Observability** Forrest Laine (UC Berkeley)*; ... Singularity Maps of Space Robots and their Application to Gradient-based Trajectory Planning** Davide Calzolari (Technical ... Event-Driven Visual-Tactile Sensing and Learning for Robots** Tasbolat Taunyazov (National University of Singapore); Weicong ... Collision Probabilities for Continuous-Time Systems Without Sampling** Kristoffer Frey (MIT)*; Ted Steiner (Charles Stark Draper ...
Explaining Multi-stage Tasks by Learning Temporal Logic Formulas from Suboptimal Demonstrations** Glen Chou (University of ... Spatio-Temporal Stochastic Optimization: Theory and Applications to Optimal Control and Co-Design** Ethan Evans (Georgia ... Frequency Modulation of Body Waves to Improve Performance of Limbless Robots** Baxi Zhong (Goergia Tech)*; Tianyu Wang ... Proximal and Sparse Resolution of Constrained Dynamic Equations** Justin Carpentier (INRIA); Rohan Budhiraja (INRIA); ... Reinforcement Learning for Safety-Critical Control under Model Uncertainty, using Control Lyapunov Functions and Control ... Vision-Based Goal-Conditioned Policies for Underwater Navigation in the Presence of Obstacles** Travis Manderson (McGill ...
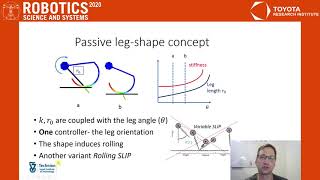
A Variable Rolling SLIP Model for a Conceptual Leg Shape to Increase Robustness of Uncertain Velocity on Unknown Terrain** ...