Media Summary: by Enrico Mingo Hoffman, Arturo Laurenzi, Luca Muratore, Nikos G. Tsagarakis and Darwin G. Caldwell -- Humanoids and Human ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.5 Authors: Mingo Hoffman, Enrico; Laurenzi, Arturo; Muratore, Luca; ... Conference: ICRA 2021 Link: This work presents an extension to the classical ...
Multi Priority Cartesian Impedance Control Based On Quadratic Programming Optimization - Detailed Analysis & Overview
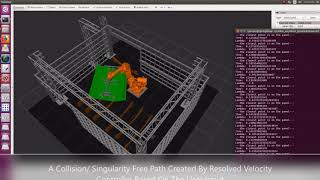
by Enrico Mingo Hoffman, Arturo Laurenzi, Luca Muratore, Nikos G. Tsagarakis and Darwin G. Caldwell -- Humanoids and Human ... ICRA 2018 Spotlight Video Interactive Session Tue AM Pod F.5 Authors: Mingo Hoffman, Enrico; Laurenzi, Arturo; Muratore, Luca; ... Conference: ICRA 2021 Link: This work presents an extension to the classical ... Check out the other videos in the series: Part 1 ... A path planner using operator inputs to generate a feasible path. The simulation is conducted using ROS Rviz. A gentle and visual introduction to the topic of Convex
Conference: ICRA 2022 Link: TBA Several industrial tasks involve impacts between objects that are undesired and riskful for ... 20171020 Symmectrial Adaptive Variable Impedance Control for Position Force Tracking of Multi Arm The robots with high Degrees of Freedom (DoF) such as humanoids and mobile manipulators are expected to perform Hsiu-Chin Lin, Joshua Smith, Keyhan Kouhkiloui Babarahmati, Niels Dehio, Michael Mistry. "A Projected Inverse Dynamics ... Bipedal robotic walking on AMBER 1 with control Lyapunov function