Media Summary: A research study by Andrea Soltoggio and Andre Lemme Research Institute for Cognition and Stefan Schaal Professor of Computer Science, Neuroscience, and Biomedical Engineering, University of Southern California ... authors : Albert Mukovskiy , Christian Vassallo , Maximilien Naveau , Olivier Stasse , Philippe Souères , Martin A. Giese Abstract ...
Movement Primitives As A Robotic Tool To Interpret Trajectories Through Learning By Doing - Detailed Analysis & Overview
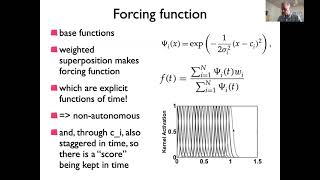
A research study by Andrea Soltoggio and Andre Lemme Research Institute for Cognition and Stefan Schaal Professor of Computer Science, Neuroscience, and Biomedical Engineering, University of Southern California ... authors : Albert Mukovskiy , Christian Vassallo , Maximilien Naveau , Olivier Stasse , Philippe Souères , Martin A. Giese Abstract ... Learning Movement Primitives from Optimal and Dynamically Feasible Trajectories for Humanoid Walking This video introduces CDMPs, a novel method to include operational constraints while Course Instructor: Pieter Abbeel Guest Lecturer: Huazhe (Harry) Xu Course Website: ...
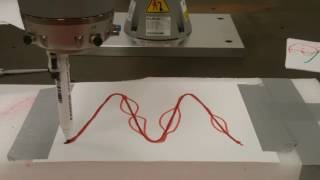
ROBOT TRAJECTORY OR PATH LEARNING BY DEMONSTRATION 2016 small A short demo of an ongoing project that looks into (i) performing an extensive experimental evaluation of dynamic motion ... This paper investigates the problem of Teaching by Demonstration (TbD) on a KUKA lightweight Master thesis by Franz Steinmetz Abstract: Despite the growing number of













![[ICRA 2021] Learning Robot Trajectories subject to Kinematic Joint Constraints - Presentation](https://i.ytimg.com/vi/pzXOxE7y7ws/mqdefault.jpg)