Media Summary: Takamitsu Matsubara, Sang-Ho Hyon, Jun Morimoto: Learning by demonstration with dynamic movement primitives Accepted for presentation in IEEE International Conference on Robotics and Automation, Paris France, May 31-June 4, 2020.
Learning Parametric Dynamic Movement Primitives From Multiple Demonstrations - Detailed Analysis & Overview
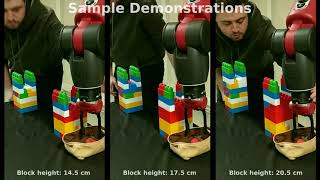
Takamitsu Matsubara, Sang-Ho Hyon, Jun Morimoto: Learning by demonstration with dynamic movement primitives Accepted for presentation in IEEE International Conference on Robotics and Automation, Paris France, May 31-June 4, 2020. This video introduces CDMPs, a novel method to include operational constraints while authors : Albert Mukovskiy , Christian Vassallo , Maximilien Naveau , Olivier Stasse , Philippe Souères , Martin A. Giese Abstract ... Master thesis by Franz Steinmetz Abstract: Despite the growing number of robots in the world, the number of service robots is still ...
Manipulation tasks may be executed using classical or Pick and place action avoiding obstacles. In this short lecture, I review the core idea behind the notion of Video of our work published at Intelligent Service Robotics.









![[RAL2019] Incorporating Safety Into Parametric Dynamic Movement Primitives](https://i.ytimg.com/vi/4A_fqxlJI5Q/mqdefault.jpg)


![[T-ASE2022] Learning and Generalizing Cooperative Manipulation Skills using PDMPs](https://i.ytimg.com/vi/1M0dpP67lXk/mqdefault.jpg)