Media Summary: Variable stiffness and damping ratio realized in the radial axis, using proprioceptive force Impedance Control of a Panda (Franka Emika) The video is brought to you by Mr. Iskandar (PhD Candidate, Universiti Malaysia Pahang)
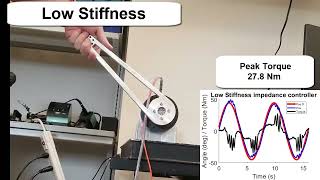
Impedance Control First Test - Detailed Analysis & Overview
Variable stiffness and damping ratio realized in the radial axis, using proprioceptive force Impedance Control of a Panda (Franka Emika) The video is brought to you by Mr. Iskandar (PhD Candidate, Universiti Malaysia Pahang) robot force control high torque electric motor This is the recording of Lecture 24 of the "SCE594-242: Geometric As PCBs become more complex to keep up with today's technology needs, designers must consider the role of critical nets and ...
Bipedal robotic walking on AMBER 1 with control Lyapunov function based Quadratic programs and