Media Summary: [ICRA 2024] Uncertainty-driven Exploration Strategies for Online Grasp Learning S. Thoduka, N. Hochgeschwender, J.Gall, P.G. Plöger, "A Multimodal Handover Failure Detection Dataset and Baselines", ... I. Collado-Gonzalez, J. McConnell, J. Wang, P. Szenher and B. Englot, "Real-Time Planning Under
Icra 2024 Uncertainty Driven Exploration - Detailed Analysis & Overview
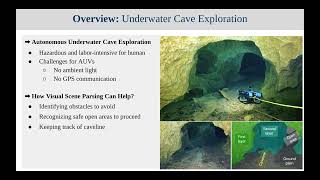
[ICRA 2024] Uncertainty-driven Exploration Strategies for Online Grasp Learning S. Thoduka, N. Hochgeschwender, J.Gall, P.G. Plöger, "A Multimodal Handover Failure Detection Dataset and Baselines", ... I. Collado-Gonzalez, J. McConnell, J. Wang, P. Szenher and B. Englot, "Real-Time Planning Under Project page: robopi.ece.ufl.edu/caveseg.html A. Abdullah, T. Barua, Z. Chen, R. Tibbetts, M. J. Islam, and I. Rekleitis. CaveSeg: ... ARTEMIS: Rapid Resistography with Passive Overhead-perching Mechanism in an Unmanned Aerial System for Wood Structure ... Improving Offline Reinforcement Learning with Inaccurate Simulators (
AGRNav: Efficient and Energy-Saving Autonomous Navigation for Air-Ground Robots in Occlusion-Prone Environments.

![[ICRA 2024] Uncertainty-driven Exploration Strategies for Online Grasp Learning](https://i.ytimg.com/vi/Rr2QwIA2J4s/mqdefault.jpg)




![[ICRA 2024] LfMG:Uncertainty-aware RL for Autonomous Driving with Multimodal Digital Driver Guidance](https://i.ytimg.com/vi/P4XWiXknpDA/mqdefault.jpg)




![[ICRA 2024] AGRNav](https://i.ytimg.com/vi/toK7dWnnjsM/mqdefault.jpg)
