Media Summary: Up-to-date High-Definition (HD) maps are essential for self-driving cars. To achieve constantly updated HD maps, we present a ... The paper was published in the International Conf. Robotics and Automation ( Presentation for the IEEE International Conference on Robotics and Automation (
Icra 2022 Diff Net Image - Detailed Analysis & Overview
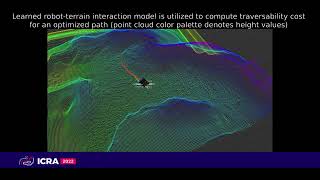
Up-to-date High-Definition (HD) maps are essential for self-driving cars. To achieve constantly updated HD maps, we present a ... The paper was published in the International Conf. Robotics and Automation ( Presentation for the IEEE International Conference on Robotics and Automation ( Arxiv: Project Page: Title: Why-So-Deep: Towards ... In this work, we propose a simultaneous localization and depth regression correctness estimation method. Owing to the ... Trajectory Optimization Using Learned Robot-Terrain Interaction Model in Exploration of Large Subterranean Environments ...
Dominik Bittner presentation of the paper "Generating Synthetic Multispectral The video presentation accompanying our paper "Learning Connectivity-Maximizing Network Configurations". For more ... 4 minute lightning talk presenting our paper "Amplitude Control for Parallel Lattices of Docked Modboats" at Continuum surgical robots can navigate anatomical pathways to reach pathological locations deep inside the human body. This video shows some of the experiments reported in the paper "Blending Primitive Policies in Shared Control for Assisted ...