Media Summary: Elod Pall and Oliver Brock, "Analysis of Open-loop Grasping From Piles" The Abstract This paper describes a novel framework for autonomous exploration in large and complex environments. We show that ... Workshop Website: Organizers: Kourosh Darvish, Joao Ramos, Rafael ...
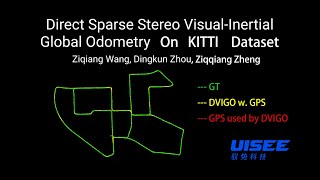
Icra 2021 Talk Granular Environmental - Detailed Analysis & Overview
Elod Pall and Oliver Brock, "Analysis of Open-loop Grasping From Piles" The Abstract This paper describes a novel framework for autonomous exploration in large and complex environments. We show that ... Workshop Website: Organizers: Kourosh Darvish, Joao Ramos, Rafael ... Our paper investigates algorithms for localization and aggregation of simple robots. Our main contribution is a localization ... Automated Environment Reduction for Debugging Robotic Systems (ICRA 2021) Drone deployment & retrieval of an instrumented dart for measuring soil strength in soft soils. An assembly sequence shows how ...
Accepted for presentation at the 2021 IEEE International Conference on Robotics and Automation ( "Interpretable Goal-based Prediction and Planning for Autonomous Driving" presented at IEEE International Conference on ... Presentation of our paper A. Mitrevski, P. G. Plöger, and G. Lakemeyer, “Robot Action Diagnosis and Experience Correction by ...