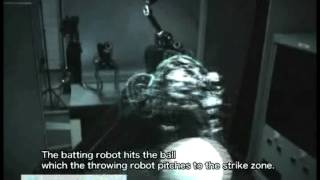
Media Summary: Recently, there has been significant progress in the development of master-slave This video introduces a demonstration of dynamic catching In this project the Absolute Nodal Coordinate Formulation (ANCF) was used to model the dynamics of the flexible beam.
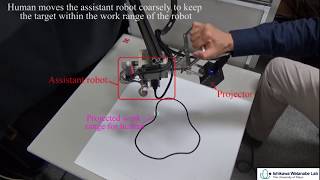
Human Robot Cooperative System Using A High Speed Vision System And A Robot Hand - Detailed Analysis & Overview
Recently, there has been significant progress in the development of master-slave This video introduces a demonstration of dynamic catching In this project the Absolute Nodal Coordinate Formulation (ANCF) was used to model the dynamics of the flexible beam. ... on visual feedback and the experimental results The purpose of this research is to develop an intuitive and highly applicable By Masatoshi Ishikawa, Akio Namiki, Taku Senoo and Yuji Yamakawa.