Media Summary: We propose a sim-to-real framework for dexterous manipulation which can generalize to new objects of the same category in the ... Chengxing Lin, Jinhong Deng, Yinjie Lei, Wen Li. "Deformation-based In-Context Learning for If you have any copyright issues on video, please send us an email at khawar512.com YOLO9000: Better, Faster, Stronger ...
Dexpoint Generalizable Point Cloud Reinforcement - Detailed Analysis & Overview
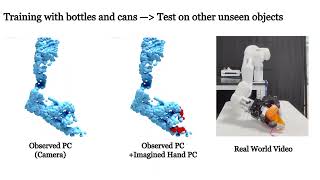
We propose a sim-to-real framework for dexterous manipulation which can generalize to new objects of the same category in the ... Chengxing Lin, Jinhong Deng, Yinjie Lei, Wen Li. "Deformation-based In-Context Learning for If you have any copyright issues on video, please send us an email at khawar512.com YOLO9000: Better, Faster, Stronger ... You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... We introduce a new trajectory optimization method for robotic grasping based on a ICRA 2018 Spotlight Video Interactive Session Thu AM Pod E.8 Authors: Mahler, Jeffrey; Matl, Matthew; Liu, Xinyu; Li, Albert; ...
Asiagraphics Web Seminar (AG Webinar) See more about Asiagraphics via: ... Object grasping using deep learning and point cloud Gil Elbaz, Tamar Avraham, Anath Fischer We present an algorithm for registration between a large-scale [CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion In this paper, we propose a novel edge and corner detection algorithm for an unorganized This video shows an example of SLAM using the feaures (lines and planes) extracted with our approach. The repeatability ...

![[CVPR 2026] Deformation-based In-Context Learning for Point Cloud Understanding](https://i.ytimg.com/vi/dd5mYZvyKXw/mqdefault.jpg)






![[CVPR 2026] GraspLDP: Towards Generalizable Grasping Policy via Latent Diffusion](https://i.ytimg.com/vi/ffcUxVQwcMc/mqdefault.jpg)


