Media Summary: Oregon State Professor Heather Knight and Agility's Head of Customer Experience Bambi Brewer get together to talk about ... Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Provably Safe and Efficient Motion Planning with Uncertain
Active Safety Control For Dynamic Human Robot Interaction - Detailed Analysis & Overview
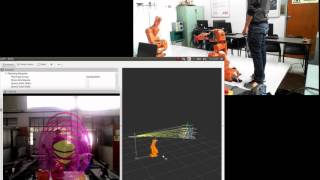
Oregon State Professor Heather Knight and Agility's Head of Customer Experience Bambi Brewer get together to talk about ... Alan HUI BON HOA, Vice President of United Robotics Group, shows us the evolution of Provably Safe and Efficient Motion Planning with Uncertain Rustler, L.; Misar, M. & Hoffmann, M. (2024), Adaptive Electronic Skin Sensitivity for Safe Sawyer adapts to the scene to plan the best trajectory. Stops and re-plans with a different speed according to user position. This video demonstrates the real-time and efficient collision avoidance planning method presented in the paper "Real-time and ...
Human-Robot Interaction (HRI) & Cobot Safety Progress in the development of artificial vision system for