Media Summary: This video is on getting real time odometry data from We (ZenoRobotics) are testing out our new autonomous mobile robot AMR learning platform product with the it has 2 EMG49 DC-Geared motor and one Driver. which control by a industrial mini PC, that runs the linux and
Lidar Based Slam Path Tracking In Ros With Rplidar A1 - Detailed Analysis & Overview
This video is on getting real time odometry data from We (ZenoRobotics) are testing out our new autonomous mobile robot AMR learning platform product with the it has 2 EMG49 DC-Geared motor and one Driver. which control by a industrial mini PC, that runs the linux and Testing to avoid obstacles ROS-SLAM-NVIDIA TX2-RPLIDAR A1 Watch the TurtleBot 3 autonomously generate a real-time map using UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
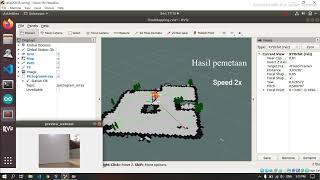
In this video you can see how I map several rooms in real time and locate the sensor at the same time. I installed Hector Object Detection and Mapping using Yolov3 and